



인체 비례 분석
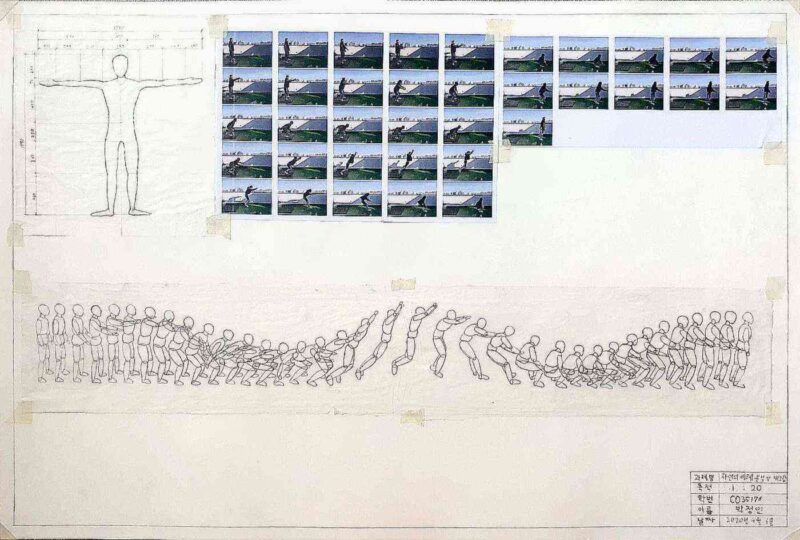
어렸을 때 학교 체력장에서 제자리 멀리뛰기를 해본 사람들은 알겠지만 제자리 멀리뛰기는 수직 움직임과 수평 움직임을 모두 요구하는 동작이다. 그만큼 제자리 멀리뛰기는 단순하면서도 매우 역동적인 동작이다. 앞으로 나아가는 수평상의 이동도 있지만 그 과정에서 상체와 다리를 접었다 피며 위로 점프하는 수직상의 이동이 함께 일어나기 때문이다.
제자리 멀리뛰기를 분석하면서 가장 집중적으로 분석한 것은 팔의 움직임이다. 팔은 제자리 멀리뛰기를 수행하는 과정에서 발생하는 수직이동 동선과 수평 이동 동선을 모두 담고 있다는 점에서 제자리 멀리뛰기의 핵심적인 움직임을 모두 담고 있기 때문이다. 또한 어깨를 기준으로 앞으로 뻗고 뒤로 젖히는 동작을 통해서 생기는 변화는 다른 신체 부위에서는 관찰할 수 없는 광범위하고 다양한 변화를 보여준다.
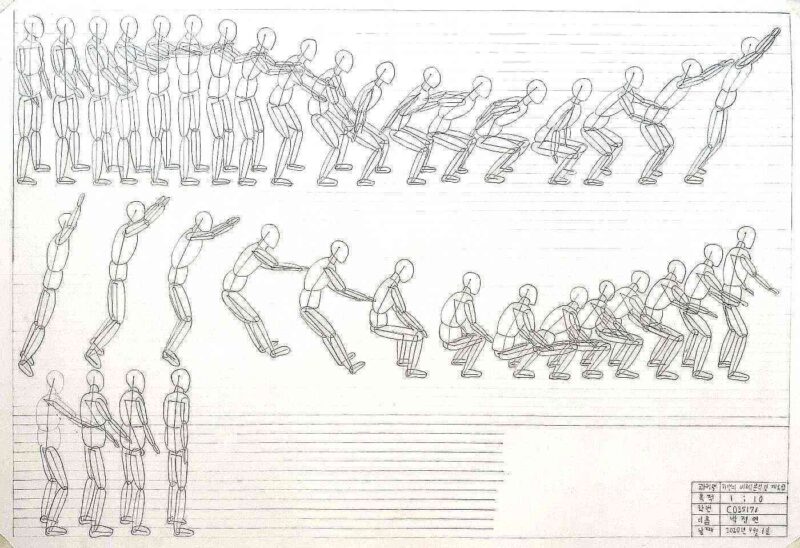
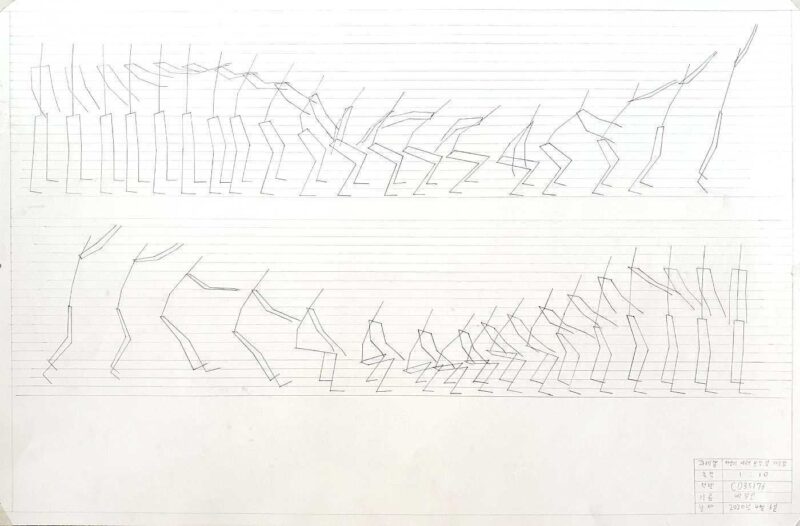
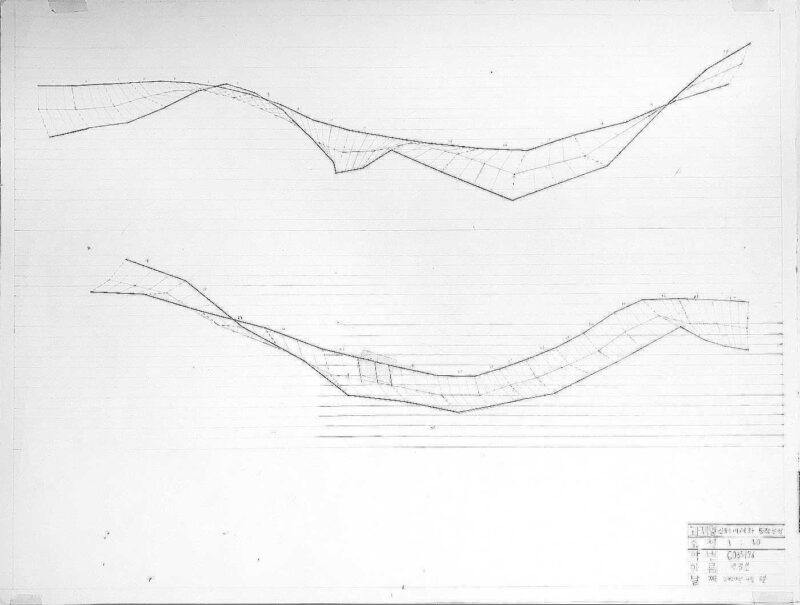
팔의 움직임에 대한 분석은 각 시퀀스에서의 팔의 위치와 형태를 일렬로 나열하며 시작했다. 이 과정에서 시간의 요소를 반영하여 점프를 한 순간과 같이 빠른 속도로 이동하는 구간에서는 다이어그램 사이의 간격을 더 크게 두었다. 그 다음 각 시퀀스에서 어깨는 어깨끼리, 손목은 손목끼리 연결하여 사다리꼴이 연속적으로 나열된 다이어그램을 완성하였다. 이를 통해 팔의 앞뒤 움직임과 높이 변화에 따른 변화를 사다리꼴의 형태와 넓이를 통해 나타냈다.
도약(The Leap)
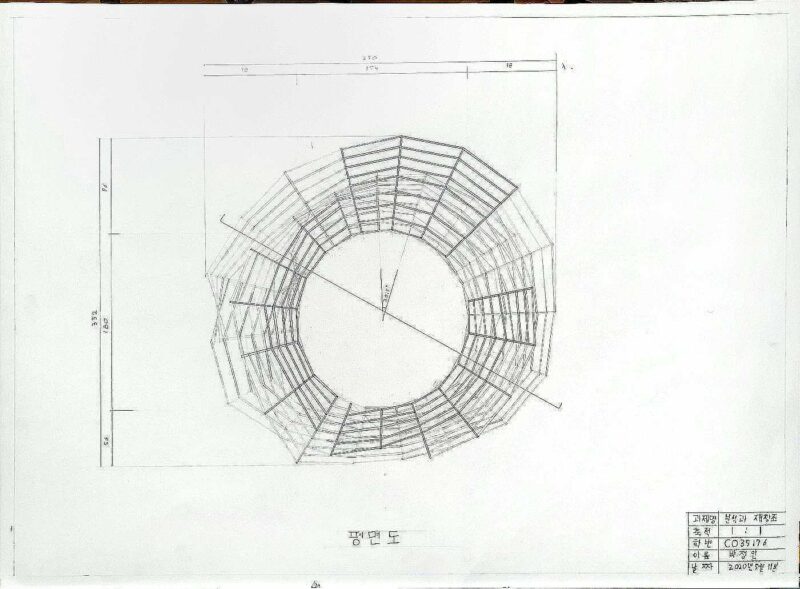
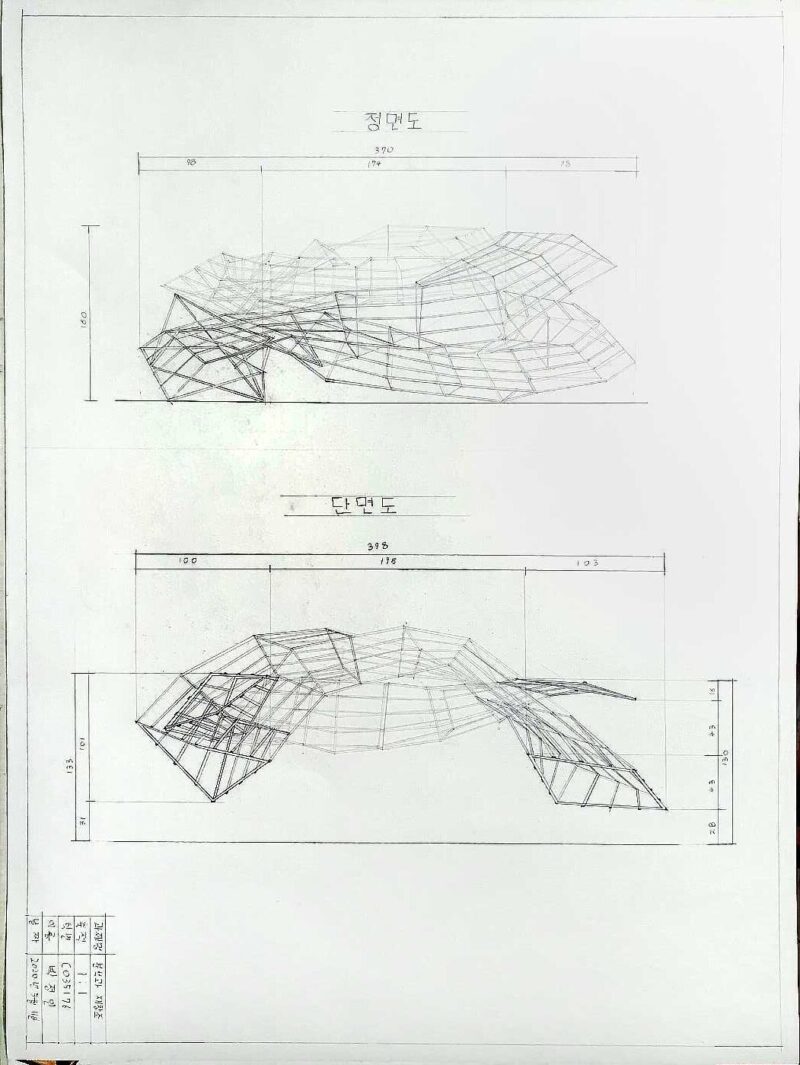
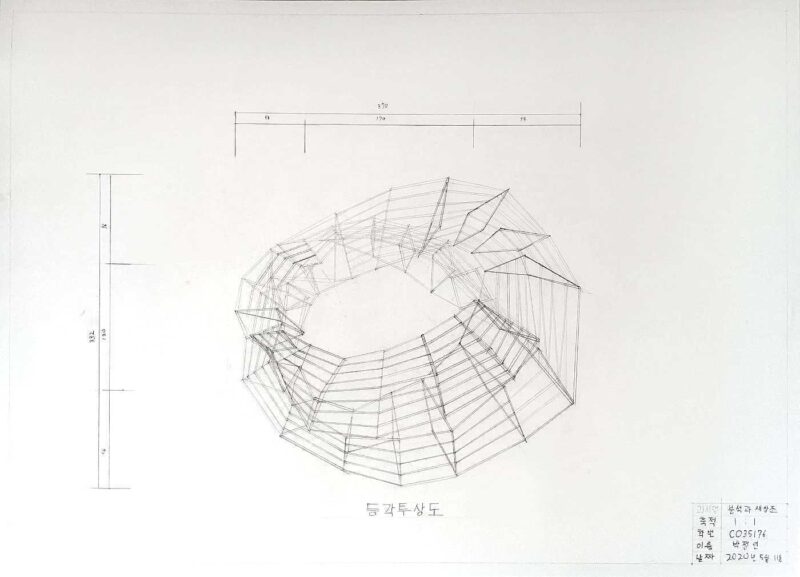
인체 비례 분석에서 나는 선으로 표현한 팔을 분석을 통하여 면으로 나타냈다. 나는 이 흐름을 이어가 분석과 재창조에서는 이전의 면을 입체로 발전시켜 오브제로 만들었다. 이 과정에서 나는 제자리 멀리뛰기 특징인 완결성과 역동성을 반영하고자 했다. 완결성이랑 직립 상태에서 몸을 구부린 뒤 도양하고 나서 다시 직립하는 완결되고 반복가능한 제자리 멀리뛰기의 성질을 말하는 것이다. 이를 위해 인체 동작 분석에서 나온 개별 사다리꼴을 새워서 원형으로 나열하였다. 하지만 단순히 원형으로는 원래 동작이 가졌던 역동성을 충분히 나타내기가 부족했기 때문에 사다리꼴을 원형으로 두 바퀴를 돌려 만들었다. 나는 이를 통해 서로 같은 x와 z축에 놓여있지만 y축이 서로 다르기 때문에 발생하는 대비를 통해 역동성을 강조하였다.
이렇게 나열된 프레임을 가로로 이어주고 그 사이에 살을 덧댐으로써 면이 밀도를 가진 입체로 인식되게끔 하였고 단 세 지점만 바닥에 고정되어 있지만 오브제 전체를 지지할 만큼의 구조적 안정성도 지닐 수 있었다.